Парализованная женщина контролировала роботизированную руку силой мысли
Травмы или заболевания спинного мозга способны нарушать проведение нервных импульсов от мозга к мышцам тела, ниже места повреждения нервных стволов. В подавляющем большинстве случаев эти нарушения являются необратимыми.
Однако в серии экспериментов, проведенных недавно американскими учеными, было показано, что используя интерфейс, объединяющий мозг и роботизированную конечность в единое целое, можно научить парализованного человека управлять искусственной конечностью - силой мысли. Последним достижением в этой области является новое исследование, в котором женщина с квадриплегией силой мысли смогла заставить манипулятор выполнять тонкие движения, с точностью до 10 градусов в искусственных суставах пальцев протеза.
Результаты этого последнего эксперимента, который был проведен учеными из Университета Питтсбурга, штат Пенсильвания, были опубликованы недавно в Journal of Neural Engineering.
Женщина, которая принимала участие в этом исследовании, это 52-летняя Jan Scheuermann, которая полностью парализована из-за спиноцеребеллярной дегенерации.
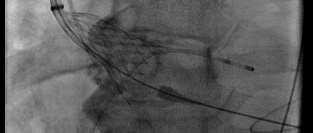
В феврале 2012 года ученые имплантировали небольшие электродные сетки с 96-ю микроскопическими электродами в отдел ее мозга, который у здоровых людей контролирует работу правой руки.
Дополнительная информация: Протез, управляемый мозгом человека, успешно проходит испытания
Электроды принимали сигналы от отдельных нейронов, передавали их на компьютер, который выявлял закономерности, обрабатывал воображаемые пациентом движения и пытался повторить их с помощью роботизированного протеза.
Результаты того исследования были опубликованы в журнале The Lancet в 2012 году, и показали, что контроль протеза мозгом технически возможен. Ученые доложили тогда о достижении контроля над протезом одновременно в семи движениях.
Опубликованное недавно новое исследование, проведенное под руководством профессора Andrew Schwartz, показало степень контроля на уровне 10-ти движений, то есть пациентке удавалось двигать протезом в различных позициях, контролируя и запястье и кисть.
Профессор Шварц и его коллеги объясняют, что интерфейс, объединяющий мозг и роботизированную конечность, позволяет пускать нервный импульс в обход поврежденных тканей, путем декодирования намерения движения, и контроля с помощью вспомогательных компьютерных устройств.
«Наши эксперименты показали, что мы можем интерпретировать сигналы от нейронов с помощью простых компьютерных алгоритмов, используя их для генерации сложных, плавных движений, которые позволяют пациенту взаимодействовать с окружающим миром», - говорит доцент Jennifer Collinger, соавтор этого исследования.
В этой научной работе ученые пытались научить парализованную пациентку четырем движениям роботизированной руки: приведению пальца, складыванию кисти в «черпак», противопоставлению большого пальца, и захвату «щепотки» большим, указательным и средним пальцем, то есть в общей сложности – 10 движений в суставах кисти.
В ходе эксперимента, Scheurmann смотрела анимацию движений, и мысленно представляла, что выполняет их, а ученые записывали сигналы, получаемые из ее мозга, и пытались откалибровать систему, заставив роботизированную руку слушаться этих сигналов. Рука должна была «читать ее мысли», и делать то движение, которое задумала пациентка.
Комментируя результаты эксперимента, профессор Шварц говорит:
«Главным выводом нашего исследования стал тот факт, что восстановление тонкой моторики кисти с помощью роботизированного протеза, у людей с полным тетрапарезом – является технически возможным».
В октябре 2014 года пациентка перенесла операцию по удалению электродов из ее мозга, на этом ее участие в эксперименте было навсегда завершено. Давая интервью журналистам, она описывала этот эксперимент как «фантастическое и захватывающее путешествие», добавив, что «это исследование сделало мою жизнь насыщенной, позволило обзавестись новыми друзьями и внести свой небольшой вклад в развитие передовой науки».
.